6X6 차동 휠 로봇 섀시는 6개의 휠 허브 모터로 구동되어 강력한 전력을 제공합니다.저압 타이어를 사용하여 독립적인 스윙 암 서스펜션 메커니즘을 갖추고 있어 안정성이 뛰어납니다.차동 조향 모드, 간단한 조향을 채택합니다.숲, 산 및 기타 가혹한 야외 환경에 적합합니다.다양한 형태로 장착할 수 있어 열악한 실외 환경에 효과적으로 배치하고 제어할 수 있습니다.
기술적인 매개변수:
2.1 섀시의 기본 매개변수:
1. 이름: 6X6 차동 바퀴 로봇 섀시
2. 모델: TIGER-04
3.★보호 수준: 로봇 본체의 보호 수준은 IP67입니다.
4. 전원: 전기, 삼원 리튬 배터리
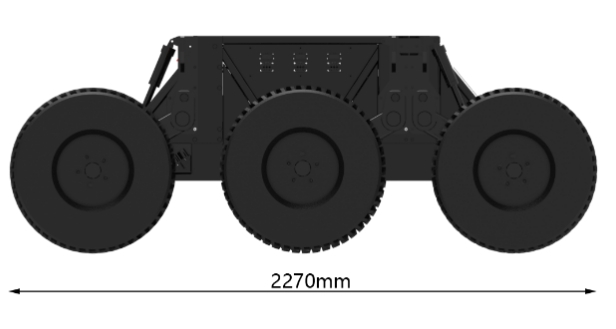
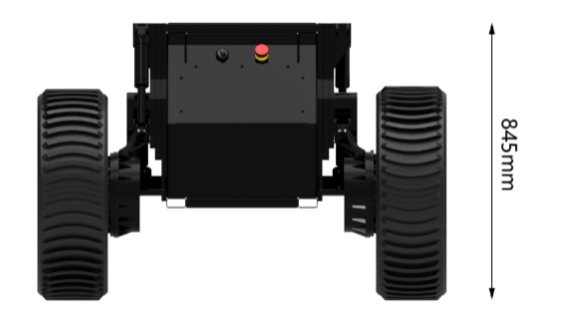
5. 섀시 크기: ≤ 길이 2270mm × 너비 1250mm × 높이 845mm
6. 캐빈 크기: ≤ 길이 1350mm×너비 350mm×높이 528mm
7. 무게 : 550kg
8. 최대하중 : 500kg
9. 모터 출력: 3kw*6
10. 모터 선택 : 96V 고정밀 DC 허브 모터
11. 스티어링 모드: 차동 스티어링이 제자리에 있음
12. 최대 주행 속도: 15km/h
13. 최대 장애물 통과 높이: 300mm
14. 최대 장벽 폭: ≤400mm
15. 지상고: 280mm
16. 최대 등반 각도: 35°
17. 표면 처리: 전체 기계 페인트
18. 본체 재질 : 합금강 / 탄소강 사각 튜브 / 알루미늄 합금
19.★로봇 타이어 : 일반 레이디얼 타이어/저압 타이어 (타이어는 주문에 따라 맞춤 제작 가능)
20. 충격 흡수 시스템: 단일 스윙 암 독립 서스펜션 시스템 *6 유압 댐핑 충격 흡수 장치