6x6 차동 바퀴 로봇 섀시는 6개의 휠 허브 모터로 구동되어 강력한 동력을 제공하며, 독립형 스윙 암 서스펜션 메커니즘과 저압 타이어를 사용하여 뛰어난 안정성을 자랑합니다. 또한 차동 조향 방식을 채택하여 조향이 간편하며, 숲, 산, 기타 험준한 야외 환경에 적합합니다. 다양한 형태로 장착 가능하여 열악한 야외 환경에서도 효과적으로 배치 및 제어할 수 있습니다.
기술적 매개변수:
2.1 섀시의 기본 매개변수:
1. 명칭: 6X6 차동 바퀴형 로봇 섀시
2. 모델: TIGER-04
3.★보호 등급: 로봇 본체의 보호 등급은 IP67입니다.
4. 전원: 전기, 삼원계 리튬 배터리
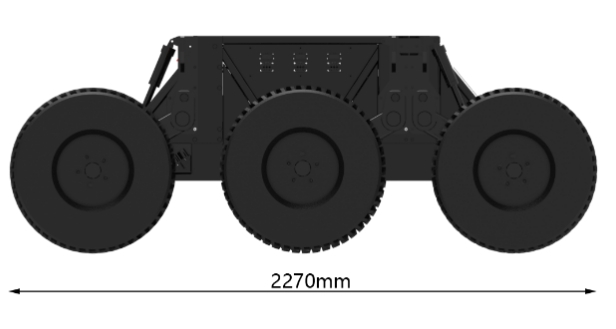
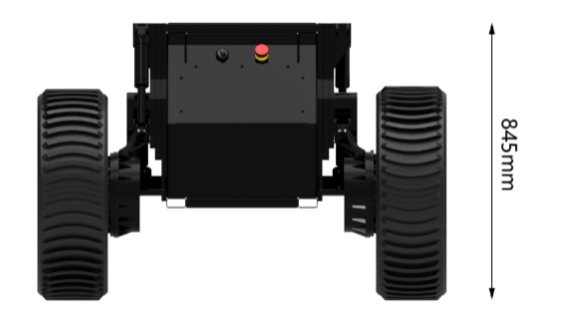
5. 섀시 크기: 길이 2270mm × 너비 1250mm × 높이 845mm 이하
6. 객실 크기: 길이 1350mm × 너비 350mm × 높이 528mm 이하
7. 무게: 550kg
8. 최대 하중: 500kg
9. 모터 출력: 3kW*6
10. 모터 선정: 96V 고정밀 DC 허브 모터
11. 조향 모드: 제자리 차동 조향
12. 최고 주행 속도: 15km/h
13. 최대 장애물 통과 높이: 300mm
14. 최대 차단벽 너비: 400mm 이하
15. 최저 지상고: 280mm
16. 최대 등반 각도: 35°
17. 표면 처리: 기계 전체 도장
18. 본체 재질: 합금강/탄소강 사각관/알루미늄 합금
19.★로봇 타이어: 일반 레이디얼 타이어/저압 타이어 (요청 시 맞춤 제작 가능)
20. 충격 흡수 시스템: 싱글 스윙암 독립 서스펜션 시스템 *6 유압식 댐핑 쇼크 업소버